Vision Intelligente/ reconnaissance d'objets par un robot mobile
Christian Wolf, Guillaume Lavoué, Eric Lombardi
Equipe Imagine
Avec le soutien du CNRS, plus particulièrement de l'INS2I, LIRIS s'est récemment doté d'un robot mobile équipé d'une caméra embarquée, de quelques capteurs (odomètres, capteurs de distance etc.), d'un module de communication par wifi et d'une puissance de calcul relativement élevée. Le robot peut être piloté en distance à l'aide d'une manette branchée sur un PC de contrôle.
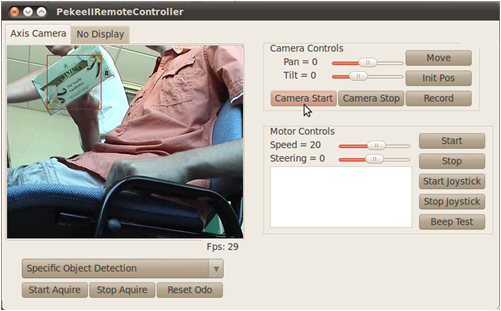
La démonstration montrera quelques travaux de l'équipe autour du thème "reconnaissance d'objets spécifiques dans la vidéo". A partir d'un modèle préalablement appris d'un objet spécifique, en occurrence une boîte de thé pour la cas de cette démonstration, le robot est capable de reconnaitre cet objet dans les vidéos acquises par sa caméra.
A terme la plateforme sera enrichie par les autres travaux annexe de l'équipe (reconnaissance de visages, reconnaissance de comportements etc.).
Davantage d'information...