
Un simulateur multi-agent de trafic coopératif
Maxime Guériau
Equipe SMA1
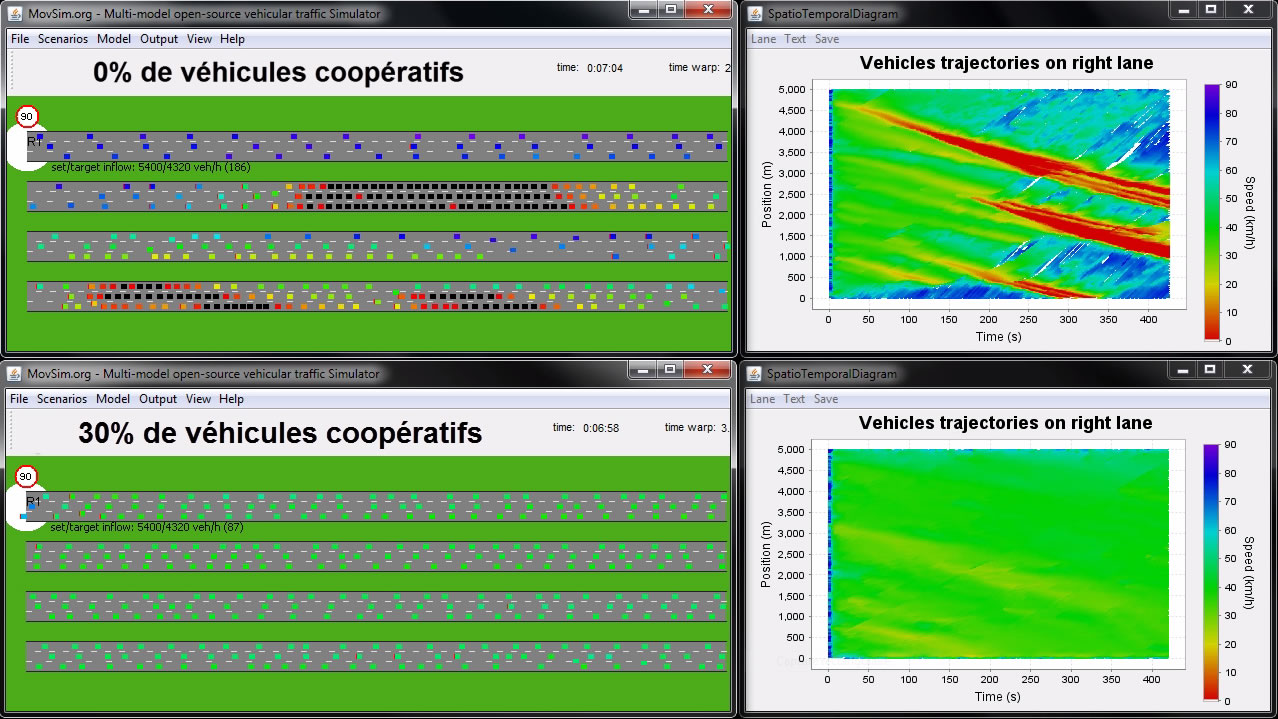
Les Systèmes Coopératifs de Transport Intelligents (C-ITS) profitent des avancées récentes des technologies de la communication inter-véhiculaire pour permettre une optimisation de l'usage de l'infrastructure routière. Les nouveaux capteurs et périphériques communicants contribuent au développement des véhicules connectés qui s'avèrent prometteurs pour l'amélioration du flux de trafic. Nous présentons un modèle multi-agent de trafic coopératif et son implémentation, vue comme une extension du simulateur de trafic MovSim. La dynamique physique des véhicules est décrite avec le point de vue du domaine de la théorie du trafic en proposant un modèle microscopique, multi-anticipatif et bilatéral de suivi de véhicules. Ce modèle est enrichi par des paradigmes agent qui influencent le comportement des véhicules grâce aux mécanismes de perception, de communication et au concept de confiance. Le travail présenté se positionne aussi comme un outil d'aide à la décision pour le déploiement futur de véhicules coopératifs et de leur infrastructure, et pour la conception de stratégies de contrôle de tels systèmes.
Davantage d'information...