Animation procédurale de créature virtuelle
Ahmad Abdul Karim, Alexandre Meyer
Equipe SAARA
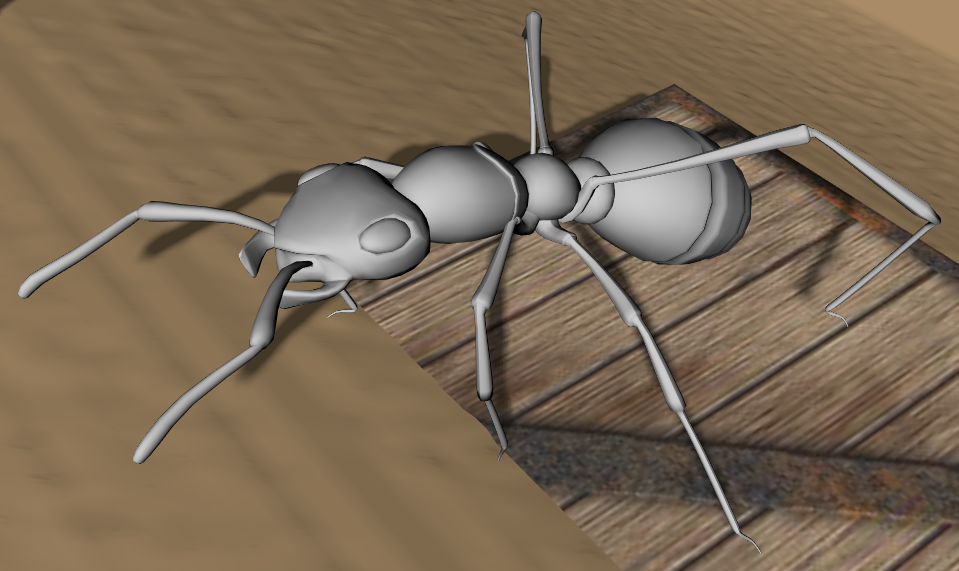
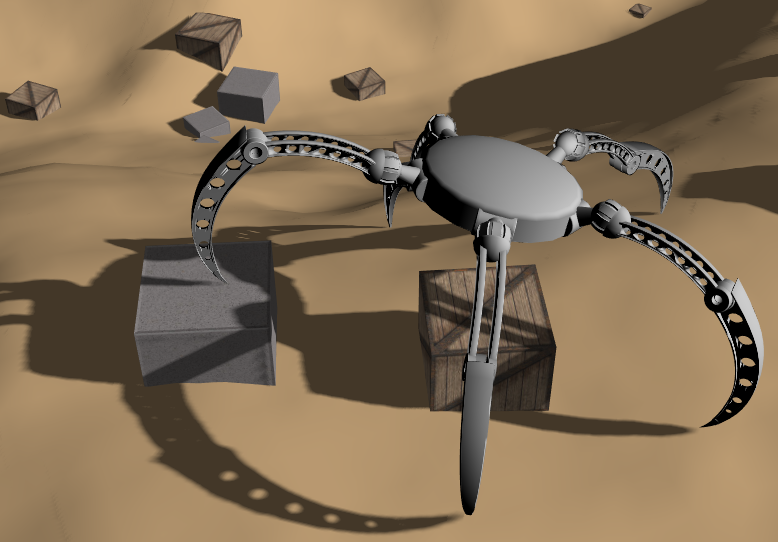
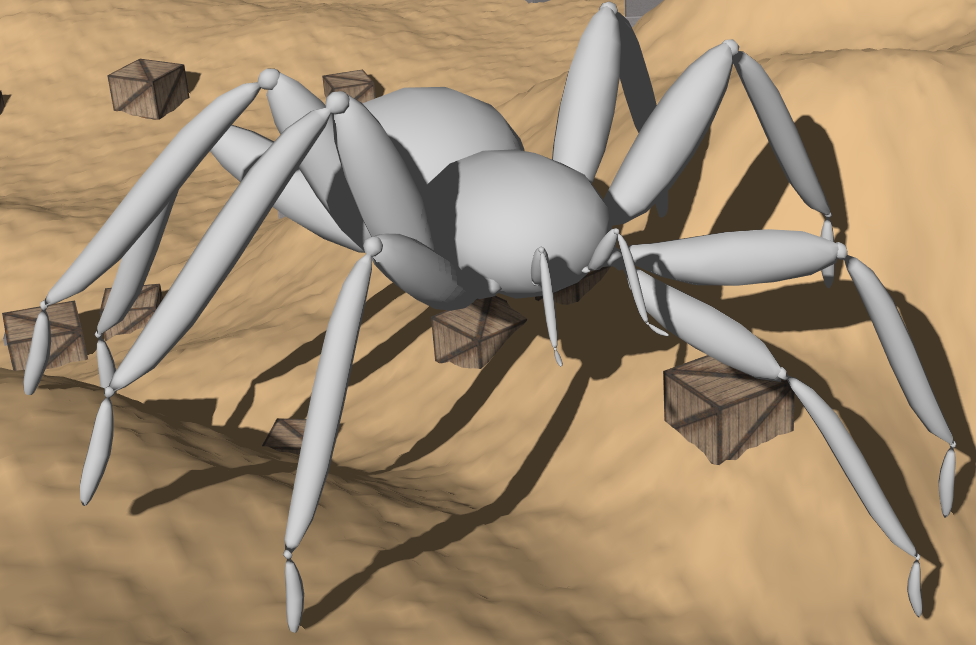
Nous présentons un système entièrement procédural générant une animation de marche pour tout type de créatures virtuelles réelles ou imaginaires "multi-pieds" comme les arachnides, les insectes, ou de nombreux type de robots. Notre méthode est totalement contrôlable et génère en temps réel une animation plausible dans un environnement dynamique : terrain en mouvement ou objets en déplacement. Le système se compose de plusieurs blocs indépendants : un contrôleur de bassin, un gestionnaire de démarche, et un planificateur de trajectoire de pieds. Le système est facilement paramétrable via une interface conviviale permettant à l'utilisateur de concevoir une multitude de styles de marche pour ces créatures, sans aucun besoin de données de mouvement préalable.
le travail est réalisé dans le cadre d'une thèse en collaboration avec Spirops et le CNRS qui assurent le financement.